can总线原理 CAN总线的基本工作原理都是什么该怎么解释 速看
关于can总线原理(CAN总线通信原理) 这个很多人还不知道,今天小编来为大家解答以上的问题,现在让我们一起来看看吧!
Can总线原理(CAN总线通信原理)
 (资料图)
(资料图)
功能:连接整车中的各种控制器,实现可靠的信息共享,减少车辆线束数量。想象一个极端的情况,如下图所示:
举个例子,如果整车上所有的电器设备都是一个独立的CAN总线节点,每个节点都向外部发送自己的当前状态,接收来自外部的信息,那么整车的控制只需要一条CAN总线控制线和电源线!
CAN总线的基本工作原理
CAN通信是通过一种类似于“会议”的机制来实现的,但是会议的进程并不是由一方(节点)来主导,而是每个会议参与者都可以自由提出会议议题(多主通信模式),两者的对应关系如下:
CAN总线工作流程
CAN总线的优势
数据传输速度1Mbit/s,距离远。
抗干扰能力强(差分数据线)
自我诊断能力(错误检测)
CAN总线 *** 结构
01 CAN总线 *** 节点结构
02为什么可以收发信机
根据博世CAN总线标准,0或1逻辑信号被转换为标准中规定的电平,并具有反馈功能。
CAN总线上的电平
2.0A/B标准规定,bus 空空闲时,CAN_H和CAN_L上的电压为2.5V
数据传输中,主导电平(逻辑0): CAN _ H3.5V CAN _ L1.5V。
隐式电平(逻辑1): can _ h2.5v can _ l2.5v。
03公交车长度思考
影响母线长度的主要因素:
(1)1)CAN总线通信的响应机制,即成功接收一帧消息的节点必须在响应字段的“响应间隙”期间发送一个“支配位”来表示成功接收一帧数据。
例如,如果通信速率为250Kbit/s,传输一位所需的时间为1/250×1000 = 4μ,那么信号在总线上的延迟时间必须小于(2μ?)以确保发送节点在响应间隙期间成功接收“主导级别”。
任何导线都可以简化为左图所示的电路模型。可以看到,其中既有电感又有电容。因此,电流在其中传播需要一些时间,而不是光速。
对于双绞线,信号在双绞线中的传播延迟时间约为5ns/m(典型值)。当通信速率达到1Mbit/s时,40米总线长度和延迟时间将达到200ns,允许延迟时间约为600ns,不可忽略!
根据以上分析:
总线速度越高,通信距离越短,对物理传输线路的要求越高。通信速度是选择双绞线、屏蔽线或其他传输线的关键参数。
影响总线长度的其他因素:
节点ECU内部的延迟时间
振荡器的容差(各节点ECU中晶振频率的差异)这些因素加起来形成CAN总线通信中的总信号延迟。
CAN总线的硬件抗干扰
共模扼流圈功能:共模电压电感大,差模电压电感为零,相当于电感滤波。它对共模电流有很大的阻碍。
120欧姆的终端电阻不是固定的,和用的线有关!
总线长度的限制-位定时和同步
CAN总线控制器根据时间片的概念,将每一位的时间分为N个时间片。这样做的目的是实现CAN总线的同步,保证不同节点之间时间的一致性。
例如,如果晶振和CAN时钟的频率为4MHz,每个时间片的最小时间为0.25μs,通信波特率为250Kbit/s,那么每一位的时间为4μs,那么每一位的时间片总数为16。当然,晶振的频率还可以进一步提高,这样每一位都可以划分得更细。
2.0A/B将每个比特的时间分为四段,同步段、传输段、相位段1和相位段2,每段占用一定的时间片。
Can总线消息帧结构
CAN总线中有四种消息:
1个数据帧
2远程框架
3个错误帧
4个过载框架
帧定义
帧开始:1位。从图中可以看出,帧间隙后从逻辑1(至少两位)到逻辑0的跳变被认为是帧的开始,其作用是为了硬同步。
仲裁字段:由29位ID标识符和IDE、SRR和RTR位组成。IDE位用于指示该帧是扩展帧(29位ID)还是标准帧(11位ID);SRR是扩展帧中的隐藏位;R r位是长距离帧标记位。
从上图可以看出,先发送11位基本ID(ID28 ~ ID18),再发送18位扩展ID(ID17~ID0)。
CAN总线的仲裁机制
大意
(1)首先发送29位ID,优先级问题。
(2)谁来决定公车级别?
CAN总线总裁机制的实现也实现了CAN总线的多主机模式,不存在总线节点谁主谁从的概念。
注意:我们可以人为赋予29位ID一定的含义,以区分不同的消息类型!
邮件过滤
报文过滤可以通过软件编程实现,也可以通过硬件实现(芯片内部的报文过滤寄存器),但两者的原理是一样的,如下图所示:
数据框中的其他场效应
控制字段:包括两个保留位(必须为0)和数据长度位(DLC0~DLC3)。数据字段:包括最多8个字节的数据。
CRC字段:是对数据进行CRC校验的算法,共15位,后面是CRC限定符-1(隐藏级)。
响应字段:两个1(总线电平低),一个是响应间隙,一个是响应限定符。成功接收数据的节点必须发送一个支配位(总线电平为高)。
要回复发送节点,必须注意,在回复间隔期间,即在1位内,主位必须将总线电平拉高。帧结束:7个连续的1(隐藏级别)
支持仲裁和错误检查的CAN总线拦截机制
监听一帧就是把发送的数据采样回来,比较采样的数据和发送的数据是否一致!
CAN总线错误检测
CAN总线通过以下几个方面进行错误检测。
当一个节点赢得总线传输权时,它将检测总线电平,当传输的电平与检测到的总线电平不一致时,它将被视为错误。
当连续出现6个相同的液位时,视为灌装错误。
错误:接收节点以与发送节点相同的方式计算数据的CRC校验值。如果接收节点的计算结果与数据包中CRC字段的数据不一致,则认为是CRC错误。
回答错误,如果在回答字段中没有监控到主导级别,则确定回答错误。
固定位错误,如CRC分隔符等。,有一个固定的水平。当监控到液位不匹配时,确定存在错误。
此外,总线同步机制也是CAN总线容错的一种方式。
注意:通过以上五种错误检测机制,发送节点和接收节点都可以检测到总线上的错误,通过错误的积累,可以关闭总线节点。
CAN总线负载率计算
计算示例:
假设CAN总线的波特率为250Kbit/s,总线报文发送间隔为10ms,报文为一个数据帧(8字节数据),那么在10ms内总线最多能支持多少条报文?
之一步:根据通信波特率计算10ms可以发送多少位(250000/1000) * 10 = 2500位。
步骤2:计算最长的帧消息有多少位。
1 of+29id+1 ide+1 RTR+1 SRR+2r+4 DLC+8 * 8 data
+16 CRC+2 ack+7eof = 128位
第三步:计算10ms内可以支持的消息数量。
2500/128 ≈ 19
从上面的计算可以看出,当10ms间隔的报文数量超过19条时,就会掉帧,总线就会饱和。
在CAN *** 的设计中还考虑了报文数量的计算。可以查阅相关文献,看看什么时候加载速率合适。
\





- win10英文输入法不见了怎么办?Win10无法关闭飞行模式怎么办?
- 低价来袭!小米13秒杀价3699元
- 柯达,从胶片巨头到破产:曾给影像世界带来了无尽的活力
- 安史之乱简介经过 这个事件是唐朝由盛转衰的转折点 天天滚动
- 实时焦点:阿迪达斯贝壳头怎么样 这个贝壳头本来是为篮球设计的
- 今日看点:4499元太劲爆了!一加11顶配版618秒杀大放价
- 简单设置关闭迅雷广告弹窗 只需几步设置并关闭弹窗即可-通讯
- 公斤和磅的换算 磅是英国和美国使用的英语质量单位 缩写为lb|环球信息
- 马大部分时间是怎么睡觉的:只有在非常安全舒适的情况下,马才会躺下睡觉
- “郑州医惠保”理赔通道正式开启 天天新视野
- 闪族人科普 色目人在美索不达米亚的历史舞台上取得了哪些成就?-全球速看
- 世界球精选!什么是平衡型基金 另外两种是收益型基金和成长型基金
- 红米K60 Pro 12GB+512GB版好价3969元|当前热点
- 快资讯:干瞪眼规则技巧说明 每桌必须有2-6个游戏玩家才能玩手游
- 水单是什么意思:是指银行付款后,收货人收到的收据 当前头条
- 平安果能吃吗 平安夜在何时才有了送苹果的这个新习俗
- 姚明十岁女儿身高近一米八 遗传了父母的优秀基因
- 简讯:三年级中秋节画 如果要用彩铅画中秋节 可以先选择这些
- 防止饺子粘皮的方法:加入一个鸡蛋可以增加蛋白质的含量
- “道路停车收费太贵”,南宁市市长鞠躬道歉
- 360安全卫士防火墙在哪里设置?防火墙阻止了浏览器连接怎么办?
- 护士节文案短句干净治愈 可以这样赞美护士无私的爱
- 四年级中秋节手抄报简单漂亮 中秋节的校园手抄报怎么写?
- 寂寞沙洲冷歌词都写了什么:实际上是根据宋词改编的-焦点讯息
- 电脑右下角的小喇叭不见了怎么办?怎么恢复电脑右下角的小图标?
- word启动不了mswrd632转换器该怎么办?转换器如何在手机上使用?
- 看图猜成语三虎一羊什么成语 这个成语就是羊入虎口
- 如何解决电脑开机发出长鸣声音的问题?电脑开机蓝屏出现英文怎么解决?
- 电脑开始菜单没有运行是怎么回事?如何调出开始菜单运行?
- 氨水的化学式和硝酸铵化学式是什么 我们一起来学习下吧
- A股跌超1%:大金融板块领跌,ST板块掀涨停潮 每日关注
- 仑替鸽讲解 养鸽子都需要多长时间 它们会不会飞走_全球今日讯
- 国联证券给予通用股份买入评级,柬埔寨工厂正式投产,海外双基地打开成长空间_滚动
- 天天热门:游民晨播报:万代MMO《蓝色协议》在西方推迟 《帝国时代4》开发商裁员121人
- 特斯拉Model Y突然自燃起火:保险公司赔新车
- 2023年碎片商店更新表(皮肤碎片商店所有列表)
- win7如何关闭硬件加速?关闭硬件加速有什么影响?
- 苹果手机隔空投送怎么用?安卓怎么往苹果手机里传照片?
- win10天气任务栏怎么关闭?win10怎么退出已有的管理员账号?
- 360安全卫士和鲁大师哪个好用?2345安全卫士是电脑自带的吗?
- win7超级终端怎么打开?windows超级终端怎么用?
- 世界播报:杀鸡儆猴的意思解释(杀鸡儆猴的意思是什么?)
- 世界滚动:孙子用爷爷手机玩游戏充值7万:遭遇拒绝退款
- 委内瑞拉政府驳斥美国在反恐问题上对委指责
- 世界报道:差价1000元 选i5-13500H还是i7-13700H
- 关注:全屋无死角 戴森海外推出全新扫地机器人
- 中国品牌再发纯国产显卡:4K 3D超强渲染能力爆表!
- 世界消息!乐高推出毅力号!车轮能360度旋转
- 人工智能为高质量发展赋能(锐财经)
- 望海楼:一个中国原则不可撼动 环球看热讯
- 土大选第三候选人宣布支持埃尔多安,美媒:埃尔多安延长统治机会增加-天天日报
- 【环球播资讯】“甜瓜”安东尼告别NBA,詹姆斯送祝福:“多么伟大的一位传奇!”
- 荒野大镖客2荣誉值有什么用 荒野大镖客2荣誉值有什么用处|每日信息
- 起诉华邮对自创社交媒体构成“生存威胁”,特朗普索赔37.8亿美元
- 愿祖国大地愈发绿意盎然(侨胞说·祖国在我心中(90))
- 即时需求多 跑腿服务忙_要闻
- 德亚牛奶怎么样感觉好便宜(德亚牛奶怎么样)
- 孙义全首次成功从北坡登顶珠穆朗玛峰
- 吉美瑞JMR品牌介绍(吉美瑞医疗器械) 天天快播
- 性能翻倍 降价后的RTX4080游戏本太香了!
- 世界快看点丨辽宁4处候鸟栖息地“申遗”提名通过国际专家评估
- 辽篮五虎将丨郭艾伦:对梦想的执着、对事业的钟爱 世界最资讯
- 新版Win11巨变:无缝集成GPT-4!系统级生成式AI工具Copilot来了
- 「数码好物」极致性能释放OMEN暗影精灵9游戏本让你随时开黑-世界热点
- 沪深港通交易日历优化“满月” 交易天数增加提升市场吸引力
- 全球速读:iOS 17来了!苹果WWDC23日程出炉:6月6日开幕
- 部分型号的惠普打印机出现"蓝屏错误"而无法使用
- 广生堂(300436):5月23日北向资金增持21.28万股 今日要闻
- 东北三省一市文史馆“主题书画巡回展”开幕
- 每日速递:辽宁开展校外培训“平安消费”专项行动 进一步遏制校外培训过高收费和过度逐利行为
- 世界观点:【手慢无】每天不到2毛钱 WPS超级会员4年仅288元
- 海底捞回应有空桌还让顾客排队:超过服务接待能力 非饥饿营销
- 富临精工(300432):5月23日北向资金减持4.8万股
- 仔猪、母猪继续涨 母猪产仔越来越少怎么回事
- 沈阳桃仙机场航班查询(桃仙机场航班查询)
- HBO没了 新MAX节目更多4K
- 快看点丨RX7600:可以超频到2625MHz165瓦
- 天天视点!苹果4发彩信怎么设置(苹果4怎么发彩信)
- 23年5月第3周,游戏王简体中文环境部分上位卡组
- 【符文之地传说】我是只小小鸟。(卡牌次类更新) 世界视讯
- 6000美元起 酷冷至尊发布球鞋造型主机
- 成功拿下 4080游戏本挑战《赛博朋克2077》超载光追-世界今日报
- 继续超大尺寸 通用准备推出纯电凯雷德
- 全球快资讯丨微软正将OpenAI ChatGPT插件引入Windows 11
- 传输用户数据回美国 欧盟重罚Meta13亿欧元
- 全球滚动:【手慢无】真是太香了!联想六核锐龙笔记本低至3749元
- 非常值得一看!
- 爱奇艺疑似被百度屏蔽 爱奇艺副总裁回应:出现了Bug
- 环球消息!iQOO Neo8 Pro发布:起步16G内存 淘汰12G!
- 流放之路S22古神熔炉赛季冠军穿刺魅影射击闪现射击文字版详细攻略
- 世界最资讯丨5G芯片本土造!库克:苹果5年投3万亿 毫不动摇扶持美国制造
- 戴尔和NVIDIA推出Project Helix 为企业提供生成性人工智能-头条
- RedmiBook 14今晚8点开售 i5版仅3699元|全球热消息
- 竹井久不吃四的鸡打-S7(宝牌相关)
- 2024年管理类联考199管理类联考综合能力逻辑部分系统班
- Google搜索广告很快将使用生成性AI自动适应查询
- 半夜看完Re:CREATORS睡不着来写写评价
- 【DNF周报/vol.117】20230515~0521
- 优然牧业(09858.HK):5月23日南向资金增持86.9万股
- 环球观速讯丨年9月16日最新相关报道消息 男子超市买葱甩水六块多秒变四块 真的太坑人了
新闻排行
-
 关注:iCloud Drive是什么以及iCloud Drive是什么意思?
关注:iCloud Drive是什么以及iCloud Drive是什么意思? -
 【播资讯】红米6a和红米6买哪个好 红米6与红米6a区别对比详细评测
【播资讯】红米6a和红米6买哪个好 红米6与红米6a区别对比详细评测 -
 天天即时:OTA升级是什么意思
天天即时:OTA升级是什么意思 -
 环球焦点!下载App不再需要输入Apple ID的方法
环球焦点!下载App不再需要输入Apple ID的方法 -
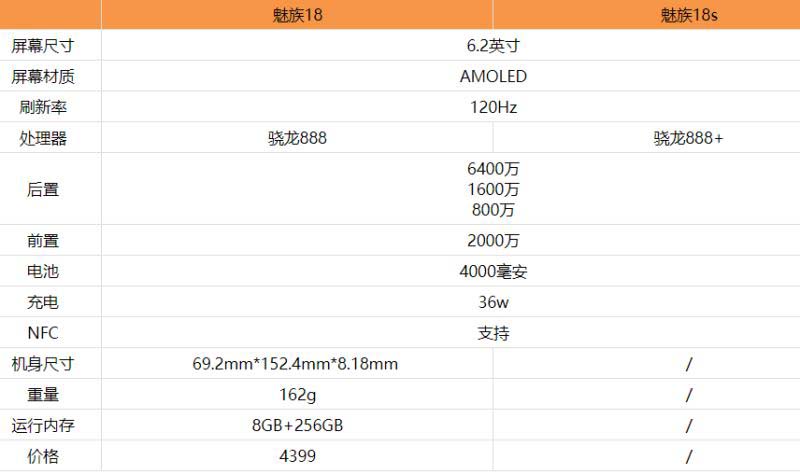 全球今亮点!魅族18s和魅族18区别是什么 魅族18s和魅族18对比评测
全球今亮点!魅族18s和魅族18区别是什么 魅族18s和魅族18对比评测 -
 天天热文:华为mate40和mate40pro哪个值得买?华为mate40对比mate40pro的区别
天天热文:华为mate40和mate40pro哪个值得买?华为mate40对比mate40pro的区别 -
 环球焦点!iPhone雷达功能怎么用?iPhone雷达功能(快播视频)查看教程
环球焦点!iPhone雷达功能怎么用?iPhone雷达功能(快播视频)查看教程 -
 环球信息:iphone手机用数据线连接电脑后只能充电无法进行文件传输的解决方法介绍
环球信息:iphone手机用数据线连接电脑后只能充电无法进行文件传输的解决方法介绍 -
 环球今热点:realmeV15对比realmeX7哪个好?realmeV15对比realmeX7评测
环球今热点:realmeV15对比realmeX7哪个好?realmeV15对比realmeX7评测 -
 当前视点!iOS 8.4 正式版发布 iOS 8.4到底升不升级?
当前视点!iOS 8.4 正式版发布 iOS 8.4到底升不升级?



精彩推荐
超前放送
- 变蛋怎么吃需要煮吗 变蛋是什么...
- can总线原理 CAN总线的基本工作...
- 上海推动要素市场化配置改革 ...
- 重庆本土方言电视剧 推荐这些陪...
- 上海话册那什么意思 “册那”的...
- 全球头条:笼罩的反义词都是什么...
- 即时焦点:新增地方债发行进行时...
- 焦点要闻:金山软件一季度净利1....
- 世界微动态丨中关村科创金融改革...
- 九江长江大桥介绍:河上的主桥长1...
- 传奇归来装备出处 《传奇归来》...
- 三国杀法正技能解释 你曾经痴迷...
- RX 7600上市前一刻紧急下调定价...
- 电石与水反应 电石是一种无机化...
- 动态焦点:出国留学申请表 留学...
- 自荐信标题的正确写法 告诉你自...
- 有缘千里来相会:人这一生,需要...
- 暴利的黑帽SEO行业 快速排名快...
- 环球最资讯丨最近删除的文件在哪...
- 洛阳市消防救援支队严查消防安全...
- 动态:代步工具介绍 其实电动汽...
- 天天精选!关于喷泉的基本概念:...
- 环球精选!回国后留学生如何进行...
- 该隐与亚伯主题曲(关于该隐与亚...
- 世界今日讯!北京2013中考录取分...
- 无花果为什么被叫无花果:神奇的...
- 心情不好的日志:重要的人越来越...
- 拓展农村新能源汽车市场(观象台)
- 世界实时:仙剑5激活码怎么获得...
- 洛克王国龙族之王怎么得 建议增...
- 皖南最后秘境石台牯牛降游玩全攻...
- 天天新资讯:问题公司退市常态化...
- 全球今日讯!大众汽车发布了旗下...
- 多城二手房交易为何小阳春后又降温
- 天天精选!二串一什么意思 体育...
- 协鑫能科拟斥资50亿投建能源算力...
- 四月十四日是什么节日 每年4月1...
- 世界头条:郑板桥竹子诗:只有郑...
- 环球即时看!鞋带蝴蝶结系法 小...
- 全球关注:为伊消得人憔悴的上一...
- 厘米和尺的换算 现代三尺等于一...
- 日本经典电影 绝对可以在你忙碌...
- 感谢相遇的短句10个字:每一次相...
- 家具销售怎么样 有什么技巧和注...
- 2020日食发生时间地点回顾 世界...
- 群幸运字符在哪设置方法 幸运人...
- 上海尤尼克斯专卖店 上海哪里有...
- borrow造句 borrow from的意思...
- 爱眼日是哪一天几月几号 请记住...
- 关于惊蛰的诗词唯美 新的节气一...
