前方交会法原理图解 一般全站仪前方交会测量是指什么 全球独家
关于前方交会法(前方交会法原理图解) 这个很多人还不知道,今天小编来为大家解答以上的问题,现在让我们一起来看看吧!
今天给大家分享一些关于前方交会法(前方交会法原理图)的问题。以下是小编对这个问题的总结。让我们来看看。
一、解释前路口、侧路口、后路口的异同
 (资料图片仅供参考)
(资料图片仅供参考)
一、不同含义:
前方交会:如果已知两点A和B的坐标,为了计算未知点P的坐标,只需观测∠A和∠ B,这种测量未知点P的平面坐标的方法称为前方交会。
侧交:如果观测到∠A和∠P或∠B和∠P,也可以确定未知点P的平面坐标。这种方法叫侧交。
后方交会:如果瞄准未知点P上的三个已知点A、B、C,测量∠ α和∠ β,也可以确定未知点P的平面坐标,这种方法叫后方交会。
第二,方法不同:
前方交会:在两个已知点处或以上观测定点的水平角,根据已知点的坐标和观测角度值计算定点坐标的方法。
交会法:在待固定的固定点上观测至少三个已知点的水平角,根据三个已知点的坐标和两个水平角的值计算固定点坐标的方法。
边交会:分别观测一个已知点和一个待定点的水平角,根据已知点坐标和观测角度值计算待定点坐标的方法。
对于sign,其值为+1或-1,具体要求是:
当A、B、P的顺序与方位角递增方向一致时,取值为1;
当A、B、P的顺序与方位角增加方向相反时,取值-1。
更具体地说,是:
在测量坐标系中,A、B、P顺时针排列时,sign = 1;A,B,P逆时针排列时Sign=-1。
在数学坐标系中,A、B、P逆时针排列时,sign = 1;A,B,P顺时针排列时Sign=-1。
二。全站仪前方交会法测量方法
全站仪前方交会测量是指在已知点上架设仪器,通过测量角度或距离来确定未知点。已知a和b的坐标分别为(xA,yA)和(xB,yB),求点p的坐标。
求数据P点的坐标(Xp,Yp)观测数据。为确定P点的位置,将经纬仪分别放在A、B两点,用回测法观测计算∠A和∠B的坐标。根据A和B以及∠A和∠B的坐标,P点的坐标为:
三。前面有什么会议。
四。大坝水平位移前方交会法的步骤
以上小编是对前方交会法(前方交会法原理图)问题及相关问题的解答。希望前方交会法问题(前方交会法原理图)对你有用!
\





- 天天短讯!fancl卸妆油怎么样 Fancl的主旋律是温和不添加 蕴含三大精华成分
- 无法连接到itunes store怎么办 本文章保证你能够解决该问题
- 什么被称为农业百科全书 为什么《尔雅》被认为是中国训诂学的开山之作-全球热讯
- 蛮族之王天赋攻略讲解 此英雄的缺点在于极度害怕强控和弱控_今日报
- 怎样破解qq空间相册密码 你都需要清空哪些历史记录-全球快看点
- 焦点要闻:日媒关注袭击岸田嫌犯个人情况:曾生活在“令人窒息的环境中”
- 【世界热闻】我的梦想绘画作品 今天让我们带着梦想一起纸上旅行
- 安排投递什么意思:是指包裹已经投递到终端,下一步就是分发给收件人-全球热推荐
- 贵宾犬美容和经典造型:一直在外形上求变,在变化中求经典_全球热推荐
- qq游戏安装失败怎么回事?qq游戏显示组件注册成功什么意思?
- 冒险岛怎么设置窗口模式?冒险岛代理购买任务怎么做?
- cpue5300怎么样:是因特尔2009年推出的产品,定位初级入门处理器|天天快报
- 最新超拽霸气说说 希望可以给到大家一些参考 可以了解一下_新消息
- 富士s9500相机的最新评测 总像素为900万 主屏尺寸为1.6英寸 今日热文
- 天天消息!大头儿子和小头爸爸歌词 这首歌发表于1995年01月01日
- 天天信息:烛之武退秦师学习指导!相关文章的学习指南就在这里
- 轩辕黄帝故里在哪里 司马迁在《史记》中是怎么写的 有哪些推论
- 世界今头条!脱毛方法大盘点 小白大多都会入门级脱毛法你可以看看
- 21三体临界风险准不准(21三体临界风险要紧吗)-环球视讯
- 通讯!弱电解决方案有哪些 本文将详细说明相关方案设计步骤
- 世界热讯:nba2konline过人连招怎么用 来看看常见的十个小技巧吧
- 康师傅矿泉水批发 康师傅矿泉水的主要成功之处是什么_环球通讯
- 小学生一篇“荷包蛋”课外阅读:每个孩子的人生旅程都会不一样 世界速读
- 今日热文:预备役网红讲科学,让科学无路可走
- 天天观速讯丨韩式眼线怎么画 大眼睛的眼线怎么画才好看 怎样让睫毛和自己的睫毛一样直
- 7850功放参数(7850) 天天资讯
- 刀豆烧肉的家常做法:你需要烧热油锅,放入葱、八角、干辣椒翻炒_环球热议
- 每日热点:星舰首飞取消:马斯克学到很多 网友们很不爽
- 熊猫人声望速刷 熊猫人版本升级怎么选择?为什么有不同说法|世界快资讯
- 突破工业CT“卡脖子”技术?这家企业获投数亿 世界观察
- 全球热资讯!女子骑摩托车遇沉降路段摔倒遭碾压身亡 竟担主责引争议:网友吵翻
- 马斯克回应SpaceX星舰发射计划推迟:今天学到了很多
- 苹果版“余额宝”!苹果Apple Card储蓄账户上线:年利率4.15% 世界今亮点
- 少年不知愁滋味(关于少年不知愁滋味的介绍)|焦点播报
- 传感器生态:佳明为何稳居霸主地位
- 微信提醒:这100万保险完全免费 全球报道
- Win11可以运行在U盘光盘上 全球新要闻
- 马斯克:每个人和狗都在买显卡|环球视点
- 空空二希(空空儿)|世界观速讯
- 创新骨传导耳机259元
- 【手慢无】原价5099元的华为MateBook 14笔记本只要4599元-快报
- 【手慢无】华硕Vivobook15限时秒杀,到手价仅为2297元-天天微头条
- 世界消息!4050游戏本到底什么水平?今年值不值得买
- 全速版小米67瓦氮化镓84元|今日热搜
- 世界热推荐:【手慢无】超强性能释放!23款联想小新16只要4288元!
- 联想 昭阳K4e-ITL i7-1195G7处理器主推-天天短讯
- 每日观点:联想 昭阳 K14系列笔记本办公专用热推
- 【当前独家】金中都城遗址将建主题公园
- 实测天花板级RTX 4090性能表现 硬件杀手级3A大作竟能上200帧-焦点滚动
- 《赛博朋克2077》再进化 DLSS 3表示无所谓我会出手
- 今日精选:PSVR2开局不佳或是被夸大了 首发表现已经是VR最好
- 速讯:购买一汽大众高尔夫GTI最高优惠0.8万元
- 【世界聚看点】《死亡岛2》最新宣传片 番茄酱一口气吃到爽
- qq上传头像失败原因(qq上传头像失败) 焦点热讯
- 【手慢无】原价7199元AppleMacBookAir现在到手价5899元
- 当日快讯:爱柯迪今日大宗交易折价成交384.38万股,成交额8006.63万元
- 全画幅相机和半画幅相机区别_相机全画幅跟半画幅有什么区别_每日视点
- 四大红歌曲原唱(四大红)
- 全球聚焦:四月PS+三个档位游戏价值一览 总计超过200美元
- Gurman:苹果iOS 17将支持App侧载以符合欧洲法规
- 环球动态:西班牙极限运动员挑战70米深洞穴独自生活500天:读完60本书 一直没有洗澡
- 【世界速看料】北京八大处整形医院双眼皮价格(北京哪里做双眼皮比较好?公立医院还是私立整形医院?)
- 【手慢无】惠普暗影精灵9 Plus 高能版 游戏本 笔记本电脑仅需15499元|播报
- 全球播报:《塞尔达传说:王国之泪》中没有出现阿陨的身影 粉丝们开始担忧
- 全球快资讯:健身一周几次有效果(健身一周几次最好)
- 无题相见时难别亦难(关于无题相见时难别亦难的介绍)-全球简讯
- 热头条丨美好医疗:去年营业收入14亿元 超七成由家用呼吸机组件贡献
- 【手慢无】爆款热卖电脑惠普(HP)暗影精灵9 限时优惠,现在仅需7499元
- 歼-20看个爽!《长空之王》影片时长128分钟_每日热文
- OpenAI招聘安卓、苹果iOS工程师,手机有望成为生成式AI硬件入口
- 观感“大”不同!华为MateBook D 16 2023款——13代酷睿i9大屏轻薄本评测|全球新动态
- TCL华星解读小米13Ultra屏幕,完整参数公布_环球今日报
- 【手慢无】爆款热卖电脑惠普(HP)暗影精灵8Pro现在仅需7799元
- 【手慢无】惠普(HP)暗影精灵9Plus 高能版 游戏本限时抢购仅需10999元
- 头条焦点:猫咪被咬神反应躲避 网友:弹射的嘴不如瞬移的腿
- 绝了!小米13 Ultra首次搭载多屏同色技术:不同材质显示相同颜色
- 环球焦点!智能辅助驾驶“天花板”!问界M5智驾版发布:27.98万起
- 意大利电影雌狼迅雷下载(意大利雌狼爱欲)
- 一加Ace2推出《原神》定制礼盒 这下不得不买了
- 【全球速看料】大象经常用鼻子吸水喷到身上,这是为了降温散热驱虫还是清除异味 蚂蚁小课堂4.18今天答案
- 天天短讯!抢到赚到!一加Ace 2原神定制礼盒发布:18GB豪华内存加持 3699元
- 天天信息:首发7999元 联想拯救者R9000P游戏本开卖:N卡性价比还得看AMD
- 世界热头条丨nova 11系列领衔!华为多款全场景新品发布
- 【手慢无】爆款热卖的小米 ProX 现仅需5999元
- 威联股份2022年亏损606.63万同比亏损增加 博物馆、纪念馆陈列布展施工受到延期影响-环球新资讯
- 【手慢无】小米Xiaomi Book 12.4英寸二合一平板笔记本电脑仅需2899元
- 当前速递!《装甲核心6》或将开启预购!Xbox版后台更新
- 79元!米家多功能充电台灯发布:可秒变手电筒_环球要闻
- 全球新资讯:阿根廷照明展完美落幕,洲明科技闪耀全场!
- 399元!1TB ZHITAI 致态 TiPlus5000固态硬盘开车
- NASA公布火星不明巨物照片:龙骨?网友脑洞大开
- 十元模式地摊暴利产品(十元模式地摊暴利产品?) 环球微头条
- 科大讯飞AI学习机T20 Pro精准备考,期中考试的得力助手!
- 文学批评经典范文(文学批评)
- 爱玛电动车不忘社会责任 公益助力中国邮政高原事业
- 马东锡《犯罪都市3》首曝预告 上来就是一大比兜
- 【世界聚看点】怀柔首个“后备箱”文旅市集即将开集
- 《西之绝境》DLC女演员发推:感谢索尼!
- 大话西游2藏宝阁买的大话币怎么取(大话西游2cbg)|世界快资讯
- 淄博一天新增烧烤店20余家 4月已新开170家烧烤企业
新闻排行
-
 关注:iCloud Drive是什么以及iCloud Drive是什么意思?
关注:iCloud Drive是什么以及iCloud Drive是什么意思? -
 【播资讯】红米6a和红米6买哪个好 红米6与红米6a区别对比详细评测
【播资讯】红米6a和红米6买哪个好 红米6与红米6a区别对比详细评测 -
 天天即时:OTA升级是什么意思
天天即时:OTA升级是什么意思 -
 环球焦点!下载App不再需要输入Apple ID的方法
环球焦点!下载App不再需要输入Apple ID的方法 -
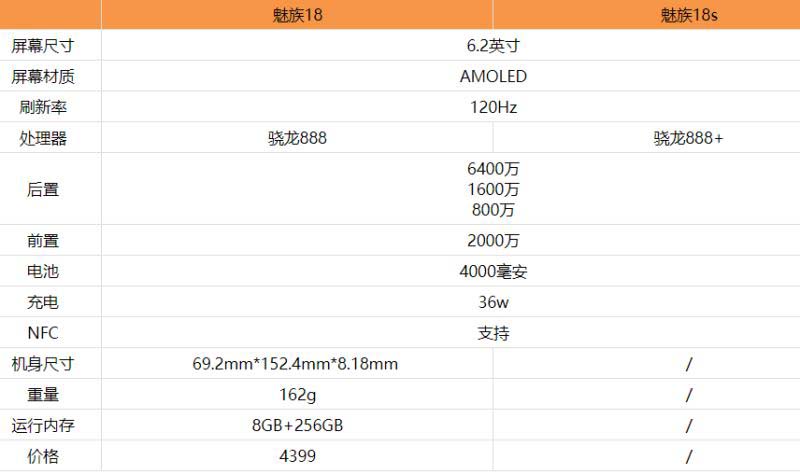 全球今亮点!魅族18s和魅族18区别是什么 魅族18s和魅族18对比评测
全球今亮点!魅族18s和魅族18区别是什么 魅族18s和魅族18对比评测 -
 天天热文:华为mate40和mate40pro哪个值得买?华为mate40对比mate40pro的区别
天天热文:华为mate40和mate40pro哪个值得买?华为mate40对比mate40pro的区别 -
 环球焦点!iPhone雷达功能怎么用?iPhone雷达功能(快播视频)查看教程
环球焦点!iPhone雷达功能怎么用?iPhone雷达功能(快播视频)查看教程 -
 环球信息:iphone手机用数据线连接电脑后只能充电无法进行文件传输的解决方法介绍
环球信息:iphone手机用数据线连接电脑后只能充电无法进行文件传输的解决方法介绍 -
 环球今热点:realmeV15对比realmeX7哪个好?realmeV15对比realmeX7评测
环球今热点:realmeV15对比realmeX7哪个好?realmeV15对比realmeX7评测 -
 当前视点!iOS 8.4 正式版发布 iOS 8.4到底升不升级?
当前视点!iOS 8.4 正式版发布 iOS 8.4到底升不升级?



精彩推荐
超前放送
- 天天快看点丨世界TBC怀旧服开放...
- 煤焦沥青的用途解析:沥青的销售...
- 方块怎么打字出来 你知道如何在...
- 私家侦探的费用大概要多少钱:一...
- 地磁偏角最早的记述 梦溪笔谈中...
- 一分钟教你读懂质粒图谱!质粒图...
- 前方交会法原理图解 一般全站仪...
- 窗口模式快捷键 建议用户按如下...
- 急得像什么该如何填空 本文将汇...
- 全球短讯!谁是世界上最萌的动物...
- 保罗帕克B费很令人失望 保罗帕...
- cpu温度多少正常 CPU温度升高是...
- 自由式摔跤规则 摔跤运动员在比...
- 世界热门:蜂蜜包装设计全方位解...
- 真我GT Neo5 SE 1T版2589元
- 宁美3060主机5619元
- AI绘制90年代“复仇者联盟” 阿...
- 插件是什么:是依靠游戏主程序开...
- 海关税则编码在线查询 海关代码...
- 全球即时看!尤文图斯主场球场叫...
- 神舟十号发射时间和返回时间 其...
- 小米13 Ultra屏幕尺寸分辨率参...
- 天天快资讯丨英雄联盟影流之主出...
- 手脱皮修复霜 脸脱皮怎么快速恢...
- 苏州人口分布图(苏州人口)
- 【世界快播报】珀斯郊区房主永远...
- 名人勤学好问的小故事 古人用语...
- 汉光帝是谁你知道吗听说过吗 “...
- 奥丹姆怎么回奥格:首先打开艾泽...
- 回想铁生:生命从不以长度来衡量...
- 【全球新视野】手游防沉迷解除方...
- 武汉大学三大知名校花:李莎子被...
- 《地平线:西之绝境》DLC新角色S...
- 热门看点:机构:一季度全球智能...
- 21部华语电影全球票房冠军 《卧...
- 教你电脑时间校准方法 如何判断...
- 领主之塔任务大全 如何通过过程...
- 最好用的中医软件是什么 寒火毒...
- 视焦点讯!迭戈·洛佩斯是什么水...
- 全球快报:软式网球和网球的区别...
- 晁错到底是怎么死的?为什么他对...
- 不到440金邦2T固态
- 用实例讲解飞镖比赛规则 其规则...
- 全球百事通!烟台到大连船票价格...
- 【环球快播报】酵母菌发酵原理 ...
- 热点聚焦:win7最低配置要求 官...
- 【环球播资讯】歌尔股份:砍单砍...
- 2022年快递停运时间表回顾 哪些...
- 密码压缩包的破解方法 如果不知...
- 免费思维导图软件推荐 基础款Xm...

